M-file:
% File Name: example5.m
% Description: Matlab m-file supporting design of DC motor
% position control.
%
% clear matlab memory and close all figures
clear all; close all;
% define motor transfer function, G
L = 1e-3; R = 1; J = 5e-5; B = 1e-4; Ke = 0.1; Kt = 0.1;
numG = [Kt/(L*J)]; denG = [1 (R/L + B/J) (R*B + Ke*Kt)/(L*J) 0];
G = tf(numG, denG);
% P-control
numD = [1]; denD = [1];
D = tf(numD, denD);
subplot(2,2,1); rlocus(series(D,G)); title('P-Control'); sgrid(0.69, [180, 500, 1000]);
[kp, p] = rlocfind(series(D,G));
cltf = feedback(series(kp*D,G), [1], -1);
subplot(2,2,2); step(cltf); title(['P-Control w/k_P = ', num2str(kp)]);
% PD-control
numD = [1 502]; denD = [1];
D = tf(numD, denD);
subplot(2,2,3); rlocus(series(D,G)); title('P-Control'); sgrid(0.69, [180, 500, 1000]);
[kd, p] = rlocfind(series(D,G));
cltf = feedback(series(kd*D,G), [1], -1);
subplot(2,2,4); step(cltf); title(['P-Control w/k_D = ', num2str(kd), 'k_P = ', num2str(502*kd)]);
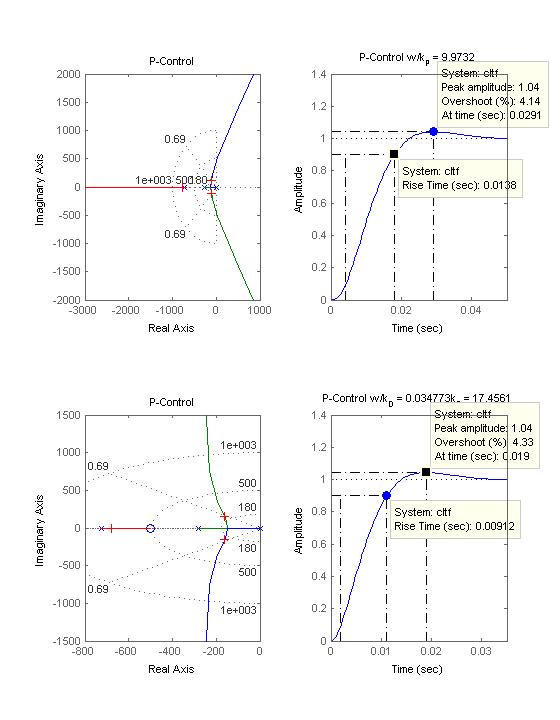
Root-Locus, Selected Poles, and Resulting Step Responses Generated: