EE 570: Programming Laboratory 2
3D Manipulator Visualization and Forward Kinematics
Write a program to compute the forward (position) kinematics and display a manipulator in three dimensions. The program should take as inputs:
- the D-H Table and
- a series of correlated joint variables, q that describe the joint movement over time.
- Homogeneous Transformation Matrix relating end-effector position and orientation to the base frame;
- display of frames 1 to n (with ability to turn on/off);
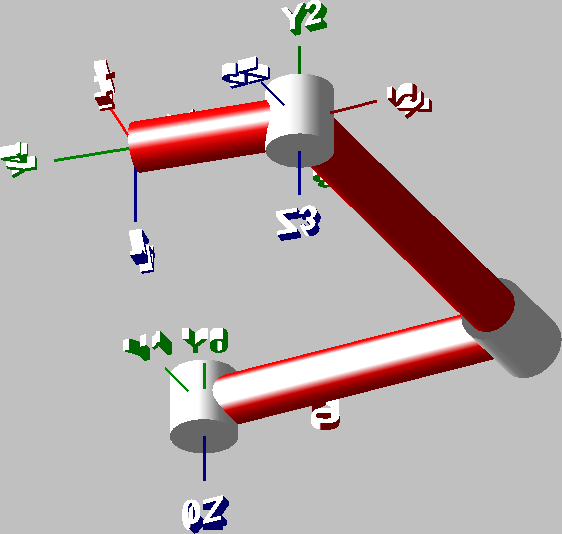
- link offsets and lengths as cylinders (or fancier objects) to visualize robot (see figure below as example, be able to turn on/off).
- Stanford
- SCARA
- PUMA 260
- Three-Link Planar RRR
- Two-Link Planar RP
Test your forward kinematics for a variety of q including moving them one joint at a time, and turn in results (values plus visualization) for the cases qi = 0 (rad or dist); qi = 1 (rad or dist), and qi = -1 (rad or dist).