Position, Navigation, and Timing
Determination of a vehicle or person’s position and/or orientation is a critical task for a multitude of applications
ranging from automated cars and first responders to missiles and fighter jets. Most of these applications rely
primarily on global navigation satellite systems, e.g., GPS, which are highly vulnerable to degradation whether
by environmental factors or malicious actions. The use of inertial navigation techniques has been shown to
provide increased reliability of navigation systems in these situations. Due to advances in MEMS technology
and processing capabilities, the use of small and low-cost inertial measurement units (IMUs) are becoming
increasingly feasible, which results in small size, weight and power (SWaP) solutions. A known limitation of
MEMS IMUs are errors that causes the navigation solution to drift; furthermore, calibration and initialization
are challenging tasks. In this research we investigate new techniques for providing accurate position and timing in challenging environments, e.g., indoors, GPS denied/degraded.
Actuator Sensor Networks
 |
Advances in micro-sensor and radio technology have enabled small but smart sensors to be deployed for a wide range of monitoring applications, such as early fire detection in forests, traffic monitoring, biological detection and homeland security. It is highly desired to have these sensors work in an ad-hoc fashion, meaning, there is no centralized unit to coordinate the communication. This feature is extremely useful, but at the same time poses a lot of challenges. In this research, there are three main thrusts: |
Transmission Power Control
In this area we focus using modern control theory and learning control ideas to modify the transmission power of each individual node. With transmission power control we are able to reduce interference, conserve battery power, and increase system capacity.
Network Scalability
In order to have the sensor network useful, it is desired to be able to deploy large quantities. Due to the limited resources and the lack of a centralized control, this poses a great challenge. In this area we focus on the scalability of the network with respect to a specific limiting parameter which is the number of nodes.
Localization
Without knowing the location of each sensor, the sensor network and the data it collects becomes useless. Hence, localization is key. Traditional methods, such as the use of GPS or manually placing and recording the position of the nodes are highly cost inefficient. In this area we focus on other techniques for localization that are more cost effective.
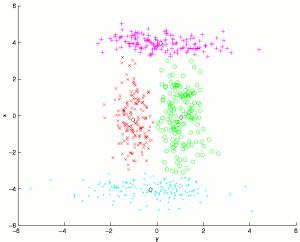
Above are several stationary sensors and several mobile sensors that act as actuator nodes. These actuator nodes are used to localize the others. It was shown through simulation that we are able to localize the nodes with an average error of 1m using our calibration free RF based localization algorithm. In the simulation a Ricean channel with a low Rice factor is assumed.
Structural Health Monitoring
As sensor technology advances, their use for a variety of applications
becomes more convenient. An application of interest is structural health
monitoring (SHM). By placing several sensors in key locations, it is
possible to monitor, analyze, and predict and detect faults in large
structures. The effectiveness and reliability of using sensors in SHM
highly depends on the placement of the sensors on the structure. It is
desired to have a large number of sensors used. In this research, we use
neural networks in combination with probability theory to determine the
optimal location of sensors on a structure given the number of sensors.
Outdoor Robotics
|
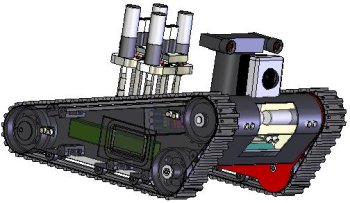
US Special Operations Command (USSOCOM) has tasked Intelligent Systems and Robotics Group (ISRG) with building field deployable intelligent mobile robots. These mobile robots will be capable of autonomous operation while providing useful surveillance information (video, audio, seismic, ...) to a remote user relying on a robust ad hoc wireless communication network. These robots will also be capable of deploying remote sensors and cave exploration.
|
|
Applications of Stochastic Learning Automata
One main advantage of learning automaton is that it needs no knowledge
of the environment in which it operates or any analytical
knowledge of the function to be
optimized. Learning automaton is a sequential machine characterized by
a set of: internal states, input actions, state probability
distributions, a reinforcement scheme, and an output function and is
connected in feedback loop to the environment.
Gaussian Mixture Modeling
|
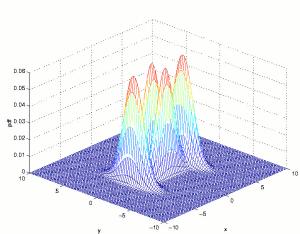
The famous Expectation Maximization technique suffers two major drawbacks. First, the number of components has to be specified apriori. Also, the Expectation Maximization is sensitive to
initialization. In this research, we present a new stochastic technique for estimating the mixture parameters. Parzen Windows are used to estimate a
discrete estimate of the PDF of the given data. Stochastic Learning Automata is then used to select the mixture parameters that
minimize the distance between the discrete estimate of the PDF and the estimate of the Expectation Maximization. The validity of the proposed approach is verified using bivariate simulation data.
|
|
This research introduces a new stochastic approach for overcoming the
drawbacks of the Expectation Maximization algorithm. The proposed
approach is based on computing a distance measure between the density
function estimated using the EM and a discrete density estimated using
kernel methods. Stochastic Learning Automata (SLA) is then used to find the
mixture parameters that minimizes the distance.
|
|
|
|
